RoboCup Junior Rescue Line — センサ処理とNXT制御
ロボカップジュニア・レスキューラインでソフトウェア制御を担当。Arduinoで各種センサ値を取得しI2CでNXTへ連携、NXCで制御ロジックを実装。ノイズ対策とチーム開発の難しさを経験。
Arduino NXT I2C NXC センサ処理 チーム開発 Rescue Line Embedded Control Robotics Noise Robustness Signal Processing Hysteresis
概要
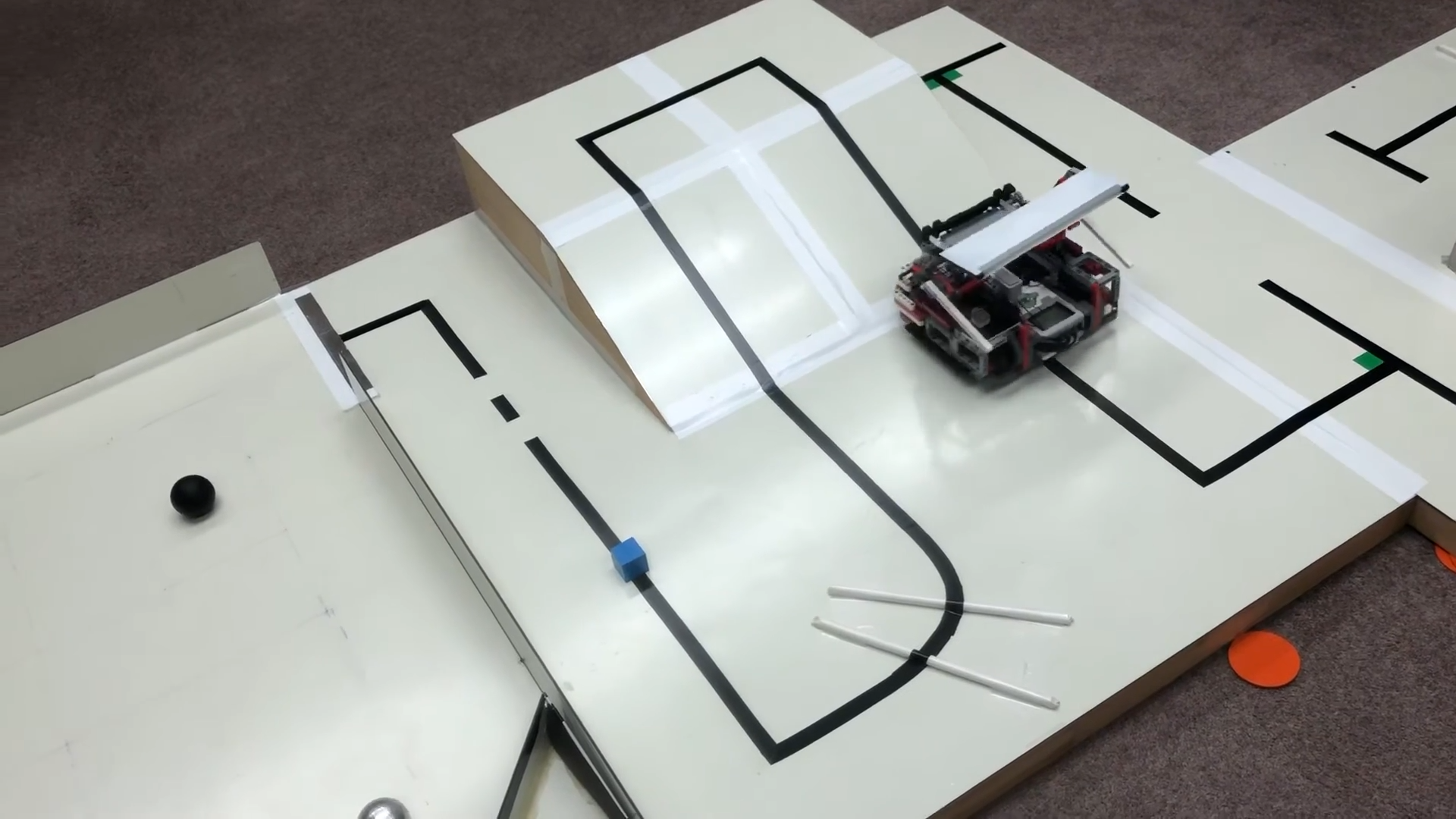
ロボカップジュニア・レスキューラインにおいて、ソフトウェア制御を担当しました。超音波・カラー・光・タッチといった複数センサの信号を Arduino で受信し、I2C 通信で NXT へ送信。NXC(C言語派生)で走行・ライン追従・障害物回避などの制御ロジックを実装しました。
期間 / 役割
- 期間: 2019年5月 - 2019年11月
- 役割: ソフトウェア制御(センサ入力処理・通信・NXT制御)
技術構成
- センサ入力: 超音波・カラー・光・タッチを Arduino に集約
- 通信: Arduino → NXT を I2C で連携
- 制御: NXC による NXT モータ・状態管理
直面した課題
- ノイズに弱い超音波センサ: 外れ値や瞬間的なノイズで制御が過敏になり不安定化。
- 対応の要点: 外れ値抑制・平滑化・ヒステリシスなど、単純な閾値分岐だけに依らない設計の必要性を認識。
チーム開発で学んだこと
- 役割分担(回路/機体/ソフト)間の依存関係により、前工程待ちで着手が遅れる状況を経験。
- ハード/ソフト間の意見衝突を通じ、ソフトだけでは解決できない領域の理解と、ハードとの協調の重要性を学習。
成果
- 関東大会に出場。コロナ禍の影響で活動が制限される中、後輩へ確実に引き継ぎを実施。